FIRST 2020 (FRC)
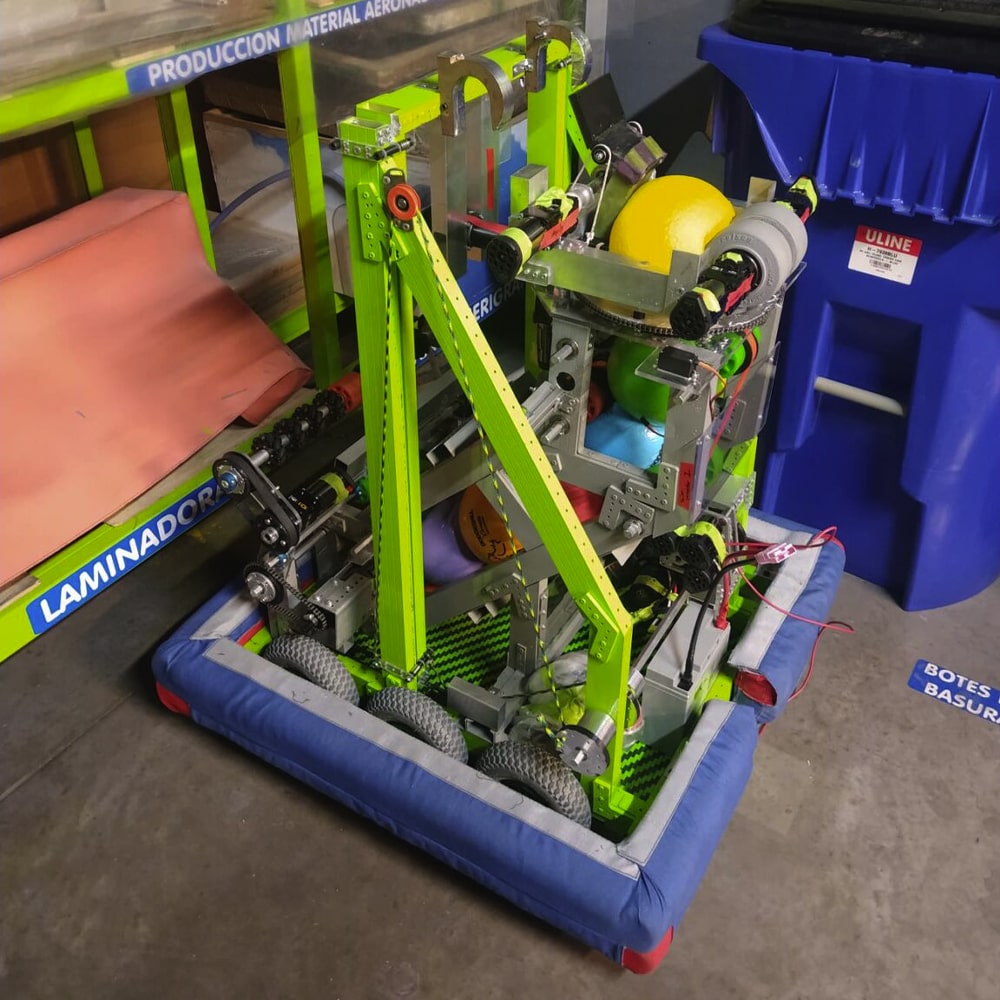
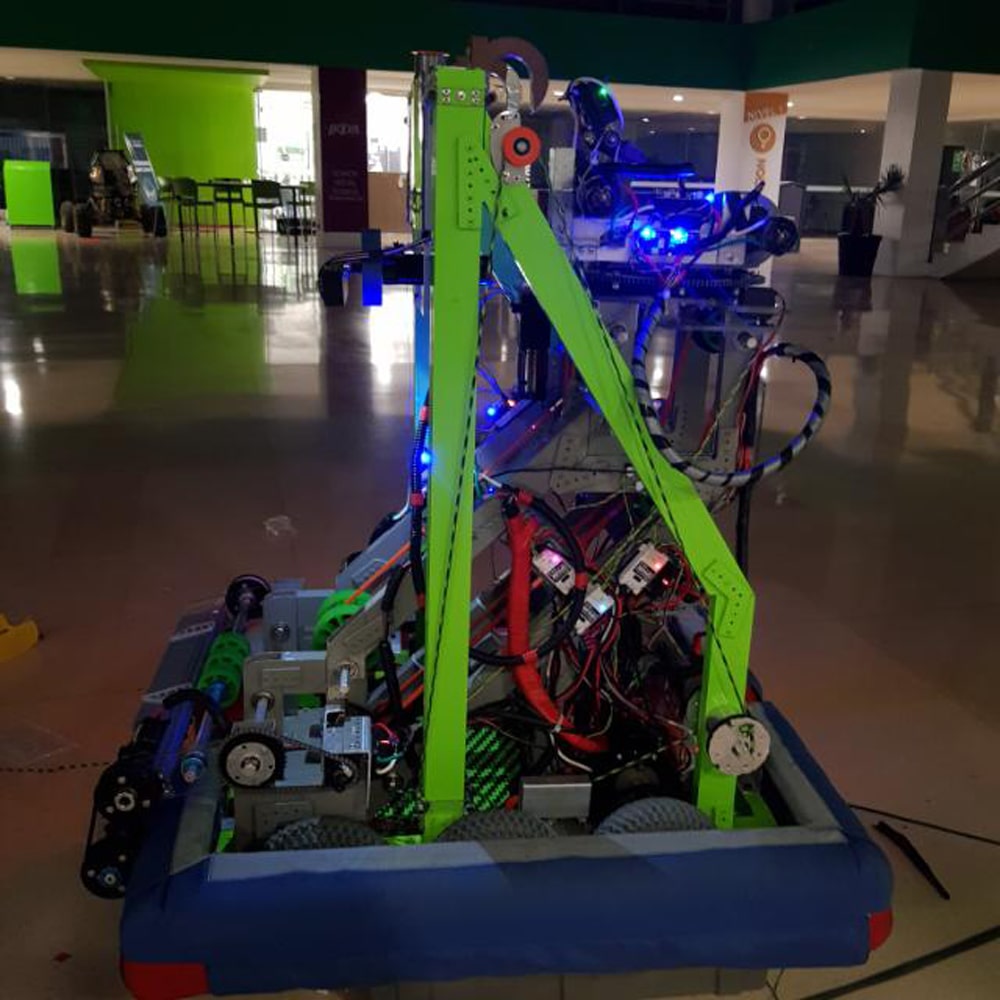
This was the first robot I designed for the large-scale robot competition (FRC). Its purpose was to collect and store 5 six-inch foam balls and then shoot them into a hexagonal goal at a height of over two meters. This robot brought me great experiences, mainly because its construction took place in the hangar of the airline "Interjet," where I had the opportunity to interact with many engineers who guided and taught me about manufacturing and chemicals.
In addition to this experience, the robot performed well in the competition, earning us the Excellence in Engineering Award, which qualified us for the World Championship. Furthermore, I personally received the "Dean's List" award, an honor bestowed upon only one student throughout the event. This award is known for recognizing individuals who exemplify the values of the competition and actively promote STEM knowledge within their community.
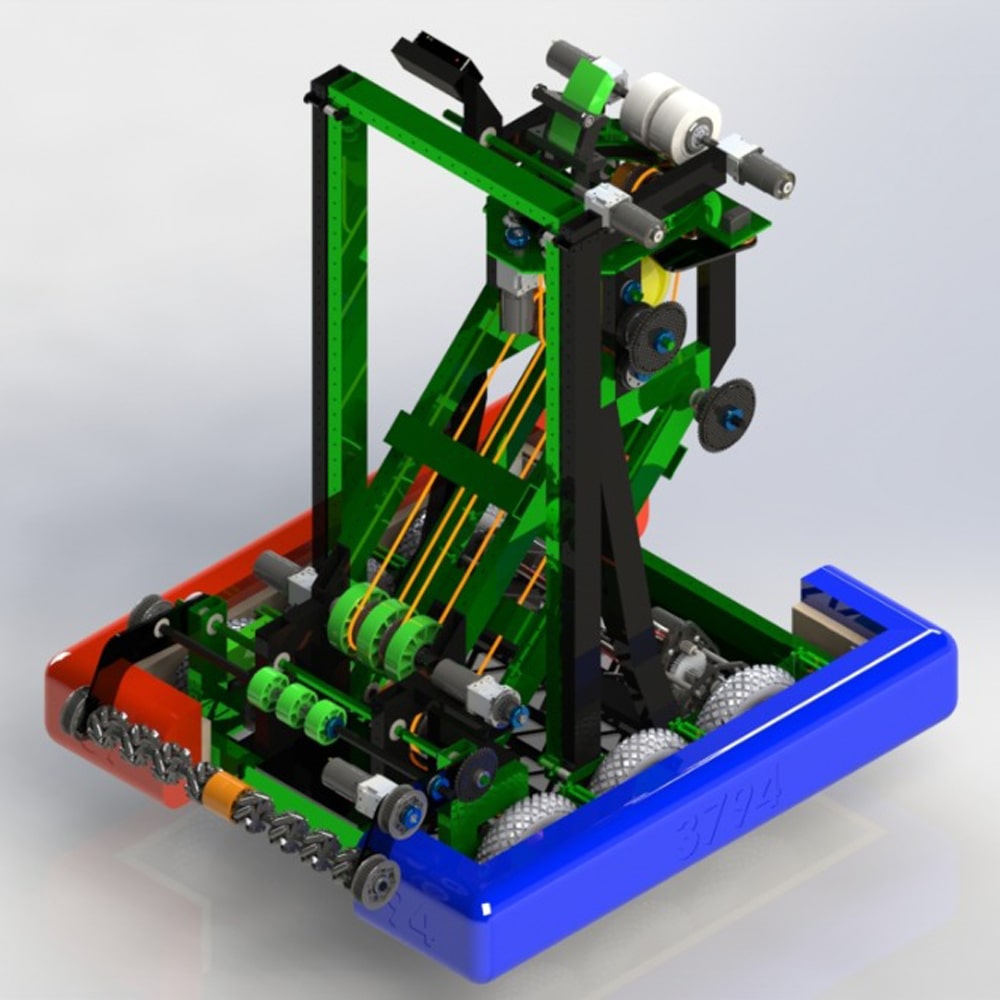
Some of the unique features of this robot are:
- A custom-made differential chassis with pneumatic tires that allows the robot to overcome various obstacles on the game field.
- A deployable intake mechanism with mecanum wheels to center the ball.
- Ball serialization mechanism in the form of a conveyor belt to accumulate the 5 balls.
- Shooter mechanism for launching the 5 balls using a high-speed motor system.
- Turret mechanism for adjusting the shooting angle with a computer vision system.
- Adjustable angle to change the parabolic trajectory of the shot.
- Elevator to hang the robot using aluminum profiles, pulleys, and three 775 motors.